




Промышленный робот за счет многообразия функций и гибкости применения может выполнять разнообразные задачи в большинстве отраслей промышленности.
Для перемещения предметов производства и выполнения различных технологических операций.
3) Технические характеристики
| Осей | Грузоподъ- емность | Позициони- рование | Мощность | J1 | J2 | J3 | J4 |
|---|---|---|---|---|---|---|---|
| 4 | 165KG | ±0.2mm | 10KVA | ±180° | +5° ~+130° | +115° ~+15° | ±360° |
| Рабочие условия | Масса | Установка | Класс | J1 | J2 | J3 | J4 |
| 0–45°C 20–80%RH (влажность) | 1500KG | Напольная | IP65 | 70° /сек | 82° /сек | 121° /сек | 200° /сек |
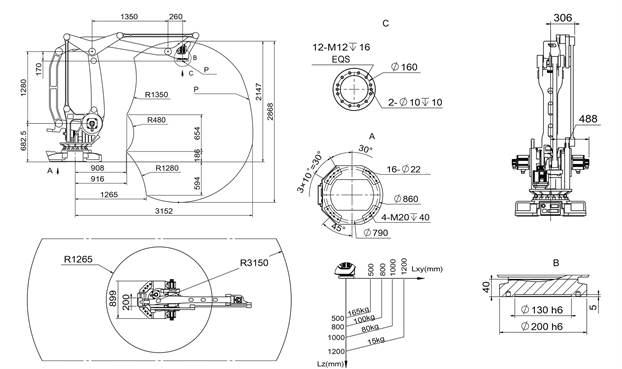
4) Максимальная зона досягаемости центра захвата– окружность радиуса до 3150 мм. На границах досягаемости невозможна максимальная укладка в высоту до 1800 — см. рисунок выше.
5) Минимальное расстояние установки паллеты от центра Робота манипулятора составляет 1300 мм
6) Наибольшая высота укладки от пола до наивысшей точки укладки — 1800мм.
7) Вращение робота 0-180 градусов. Не 360!
8) Защитные ограждения для зоны досягаемости с воротами с оптическими датчиками и автоматической системой остановки робота при пересечении барьеров является обязательной комплектацией.
9) Производительность робота рассчитывается по циклограмме работы и зависит от углового перемещения робота из точки в точку, вида захвата, т.е вида груза, схемы укладки и т.д.
10) Максимальное количество циклов в минуту- 30 – расчет теоретический.
11) Среднее количество по опыту на оптимальной схеме расположения- 10-12 мешков 25кг в минуту- информация для ориентирования! Количество циклов до 400 в час.
12) Для установки робота в помещении необходимо изготовить массивную сварную конструкцию с монтажными отверстиями для установки анкеров.
13) Толщина пола (армированная бетонная стяжка) в месте установки Робота манипулятора от 250 мм до 400 мм.
Управление роботом (контроллер)
Управление роботом осуществляется с контроллера.
Контроллер робота используется для управления следующими системами:
- Робот
- Внешняя кинематическая система
Контроллер робота состоит из следующих компонентов:
- ПК управления
- Блок питания
- Пульт управления
- Логика безопасности
- Панель подключения
ВИДЫ ЗАХВАТОВ ПОД РАЗЛИЧНЫЕ ГРУЗЫ
Вид захвата подбирается под вид груза, его размеры, массу, вид упаковки.

- Высокая скорость — быстродействие захваты позволяет укладывать до 800 мешков/час,
- Универсальный — регулируется под ширину мешка,
- Центровка мешка захватом — за счет прижимных планок;
- Жесткая фиксация мешка за счёт прижимных планок с сверху,
- Универсальный фланец позволяет установить захват на роботы разных производителей,
- Оптимальный вес 86 кг — можно использовать роботов с невысокой грузоподъемностью,
- Комбинированный — можно установить дополнительные схваты, которые позволят перемещать пу-стой паллет из магазина в зону погрузки.
Тип захвата:
Клещевой
⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯
Масса захвата:⠀⠀
86.4 кг
⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯
Исполнение материала захвата:⠀
Конструкционная сталь с порошковым покрытием
⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯
Условия эксплуатации:⠀
Температура окружающей среды +10 градусов
Температура перемещаемого объекта +60 градусов
⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯
Сделан под конвейер-рольганг, ролики диаметром 50мм, расстояние между роликами рольганга 75мм
Характеристики:
- Досягаемость, м: 3,15
- Полезная нагрузка, кг: 165
- Кол-во осей: 4
- Вес мешка, кг: до 25
РМ-10 Комплект поставки:
- Рука манипулятор, подставка под манипулятор, рольганг приёма, блок управления
РМ-10 с автоматизацией. Комплект поставки:
- Рука манипулятор, подставка под манипулятор, рольганг приёма
- Механизм подачи паллет с магазином на 10шт.
- Рольганг отвода и накопления паллет, блок управления
Опции:
- Механизм подачи паллет с магазином на 10 паллет
- Транспортеры с выравнивателями
- Прижимной ролик (уплотнитель мешка)
- Поворотный ролик
- Обмотчик паллет/упаковщик в термоусадочную пленку
- Дополнительные рольганги для хранения паллет
Описание:
Рука-манипулятор РМ-10 производит укладку мешков весом до 25 кг на паллеты.
Преимущества руки-манипулятора РМ-10:
- Легкая настройка на работу с различными размерами паллеты, т.е при смене размера паллеты необходимо только в программе внести новый рецепт.
- Отсутствие большого количества быстроизнашиваемых частей, более простая механическая настройка работы ( меньше количество натяжителей, регулировочных болтов и стопоров).
- Легко расположить в ограниченном пространстве: для руки манипулятора достаточно 3 метра высоты потолка.



